Когда муравей встречает широкую щель, которую не может преодолеть самостоятельно, он подает сигнал другим муравьям, чтобы они образовали живой мост из своих тел. Подобное поведение скопировано в небольшом четвероногом роботе, который может стать источником вдохновения для более совершенных поисково-спасательных роботов.
Четвероногие шагающие роботы определенно имеют некоторые преимущества перед колесными, включая то, что они могут перешагивать через препятствия и преодолевать их при передвижении по пересеченной местности. Поэтому предполагается, что группы таких роботов могут найти применение в таких областях, как поиск выживших в местах катастроф.
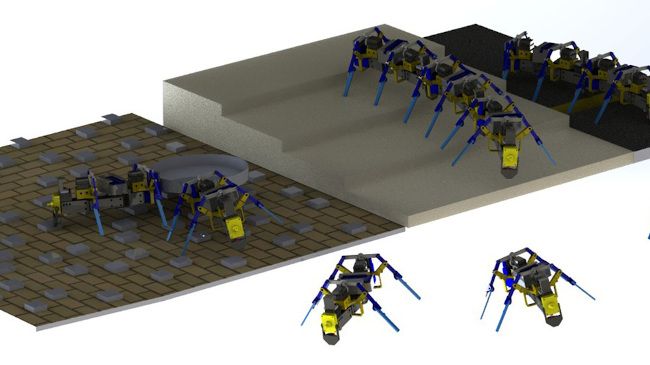
Однако даже такие роботы могут быть остановлены глубокими пропастями или слишком крутыми препятствиями. Учитывая эти ограничения, доцент Университета Нотр-Дам Ясемин Озкан-Айдин (Yasemin Ozkan-Aydin) создала партию 3D-печатных четырехногих роботов, которые могут работать вместе, чтобы обойти такие препятствия.
Каждый робот, длиной от 15 до 20 см, оснащен литий-полимерным аккумулятором, микропроцессором, датчиком света, а также магнитными датчиками касания на передней и задней части корпуса. Когда робот застревает, он посылает сигнал по беспроводной связи другим роботам, находящимся поблизости. Когда те прибывают, они используют свои магнитные датчики касания, чтобы определить ориентацию относительно друг друга и соединяют свои тела в цепочку. Таким образом, они могут образовать мост для преодоления пропастей или других препятствий, а также могут работать вместе для переноски предметов, слишком больших и тяжелых для отдельно взятого робота.
На данный момент исследователи работают над улучшением чувствительности, возможностей совместной работы и увеличением заряда батареи своей роевой робототехнической системы. Наряду с использованием в поисково-спасательных операциях, в конечном итоге она может найти применение в таких областях, как освоение космоса, мониторинг окружающей среды или изучение коллективной динамики насекомых, таких как муравьи и термиты.
Статья об этом исследовании была опубликована этим летом в журнале Science Robotics.