Восемь лет назад в ETH Zurich представили Cubli, роботизированный куб, который с помощью трех внутренних реактивных колес и сложной программы может балансировать на своих углах и ребрах. Это довольно зрелищная разработка, но в то же время довольно простая для понимания: вращение реактивных колес оказывает силу на куб в противоположном направлении, в результате чего достигается точный контроль над креном, тангажом и рысканьем, что позволяет Cubli балансировать, двигаться и даже прыгать.
Это очень здорово, но очевидно, что для управления Cubli по трем осям требуется три реактивных колеса. Если убрать одно колесо, то одна из осей Cubli будет делать все, что захочет, а если убрать два колеса, то он перевернется.
Решив, что количество степеней свободы для самобалансирующегося куба слишком просто, исследователи из ETH Zurich (Матиас Хофер, Майкл Мюлебах, Раффаэлло Д’Андреа) решили построить One-Wheel Cubli (OWC), который балансирует на точке точно так же, как и оригинальный Cubli, только с одним единственным реактивным колесом.
OWC использует свое единственное реактивное колесо для управления по тангажу и крену. Степень рысканья не контролируется, что означает, что OWC может вращаться вокруг своей точки вращения, хотя благодаря трению этого не происходит. Наличие большего количества степеней свободы, чем исполнительных механизмов (в данном случае реактивных колес), означает, что OWC является так называемым малоприводным (underactuated) устройством. Но очевидно, что для выполнения этого балансировочного акта требуется полный контроль над двумя совершенно разными осями.
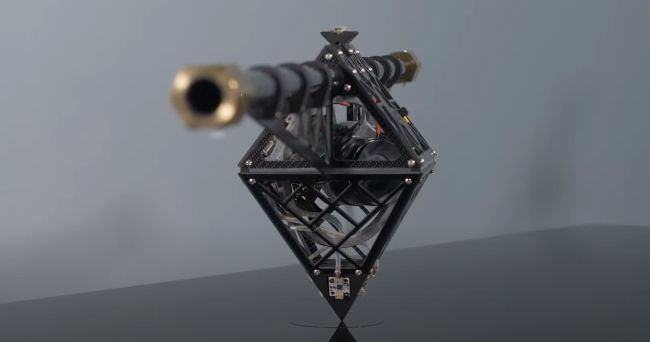
Матиас Хофер объясняет, что балансировку One-Wheel Cubli можно представить себе как попытку сбалансировать на ладони швабру, при этом вам нужно беспокоиться о балансировке только по одной оси, т.е. она будет наклоняться к вам или от вас, и вы можете перемещать ладонь для компенсации. Что-то более короткое, будет труднее сбалансировать и потребует коротких и быстрых движений ладонью. Между тем, более длинную швабру гораздо легче уравновесить, и вы можете делать это более медленными движениями. По сути, это принцип работы OWC: у вас может быть только один управляющий вход для работы, но маленькие быстрые движения и большие медленные движения разделены настолько, что один актуатор может управлять ими обоими независимо, делая маленькие быстрые движения внутри больших медленных движений. И это причина наличия в конструкции длинной балки с грузами на конце, которая отличает OWC от оригинального Cubli: она нужна для того, чтобы максимизировать разницу в инерции между двумя осями, которыми вы пытаетесь независимо управлять.
«Увидеть баланс OWC впервые было неинтуитивно, поскольку принцип работы не очевиден, — сказал Хофер в интервью IEEE Spectrum. — Для нас это было очень приятно, поскольку это означало, что каждый кусочек головоломки проекта, в который внесли свой вклад Майкл Мюлебах, Раффаэлло Д’Андреа и я, а также наш технический персонал (Майкл Эгли и Маттиас Мюллер), наконец-то сработал — включая теоретический анализ, разработку прототипа, моделирование, оценку состояния и разработку системы управления».
Все эти части головоломки требовали много времени, чтобы соединиться вместе, и потребовались годы работы, чтобы перейти от того, что теоретически работало на бумаге, к реально работающей системе. После неудачи нескольких итераций аппаратного обеспечения исследователи приложили дополнительные усилия для создания более детального подхода к моделированию, который они затем использовали в системе управления, которая в конечном итоге оказалась успешной. Одним из самых важных приемов, как оказалось, было тщательное моделирование того, как именно отклоняется балка с грузами на концах. Отклонение невелико, но его достаточно, чтобы все испортить. И, как можно видеть на видео, система управления настолько успешна, что, несмотря на недостаточно активную природу OWC, она даже способна компенсировать некоторые легкие толчки.
One-Wheel Cubli — это не просто абстрактный программно-аппаратный проект. Здесь есть потенциальные полезные приложения, одно из которых — управление положением спутников. Многие спутники уже используют реактивные колеса для поддержания правильного направления, и эти реактивные колеса настолько важны для функциональности спутника, что обычно в комплект входят запасные колеса, что увеличивает массу и сложность.
Источник robogeek