Автопилоты и другая роботизированная техника учится лучше и глубже оценивать дорожную обстановку, чем водитель-человек. В это ей помогают также технологии обнаружения объектов вне прямой видимости. Однако из множества технологий визуализации объектов «за углом» до сих пор не было способа получить картинку в высоком разрешении. Учёные из Калифорнийского технологического института заполнили этот пробел, предложив новую технологию UNCOVER.
Традиционно «за угол» можно заглянуть, если проанализировать в зоне прямой видимости свет, отражённый от других объектов, например, от стен. Поскольку свет от таких объектов рассеивается, более-менее цельное изображение можно собрать с помощью ИИ-алгоритмов. Но если рядом с искомой целью есть точечный источник света — guidestar (звезда гидирования), то скрытый объект можно рассмотреть намного детальнее.
Свет от точечного источника позволяет вычислить волновые фронты отражённого от стен света и использовать эту информацию для расчёта светового потока от наблюдаемого скрытого объекта. Проблема в том, что в обычной дорожной обстановке подсветить скрытые объекты никак невозможно. В противном случае каждому пешеходу и каждой машине на улице пришлось бы придать свою собственную «путеводную звезду».
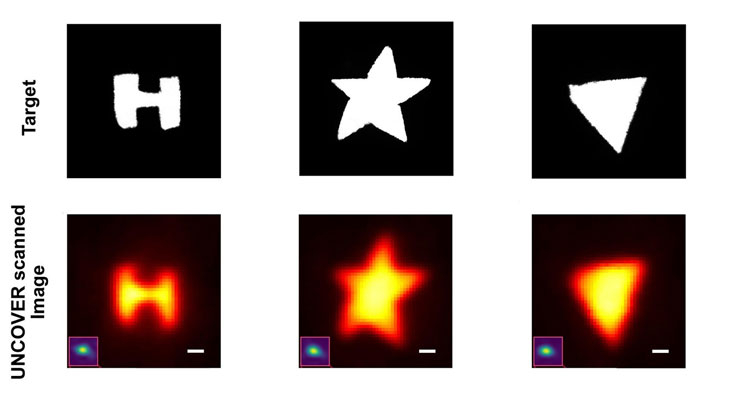
Технология UNCOVER позволяет использовать как guidestar сам скрытый объект. В эксперименте учёные показали возможность различить находящиеся вне зоны прямой видимости сложные символы в виде звёздочки, геометрических фигур и букв. Предложенная технология, уверены учёные, поможет улучшить автопилоты на улицах городов и роверов на далёких планетах. Марсоходу не нужно будет пробираться по труднопреодолимым преградам, чтобы осмотреть скрытые за ними объекты. Если вокруг светло, он получит картинку даже за линией прямой видимости.
Источник 3dnews